CS/EGシリーズカメラのPythonサンプルプログラムはOpenCVで使えるようにはコーディングされていません。
これは、特定のライブラリに依存させない、一般的なコードとなっているためです。
以下「GrabImage.py」を例に説明します。
Python-OpenCVはnumpyを利用しており、画像データはnumpy配列として取り扱われます。
GrabImage.pyはwork_thread()中のMV_CC_GetOneFrameTimeout()で画像を取得しており、画像データはpDataで引き渡されますが、これはC言語で言うところのポインタで、このままではOpenCVで使用できません。
このpDataをnumpy配列に変換します。
1)以下の2行のimportを追加します。
- import numpy as np
- import cv2
2)__main__のret = cam.MV_CC_GetIntValue(“PayloadSize”, stParam)行の前あたりに、カメラから出力される画像データ形式をRGBに設定する以下の行を追加します。
· ret = cam.MV_CC_SetEnumValueByString(“PixelFormat”,” RGB8Packed″)
RGB8Packedの部分はカメラによって異なります。
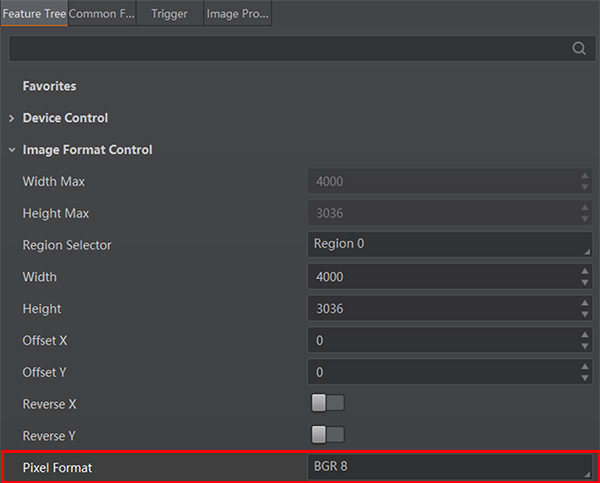
VisionEyeを開きカメラを接続後Feature Tree → Image Fromat Control → Pixel Format
に選択できる文字を下記表から探して対応する文字列を入れてください。
| VisionEyeでの表示 | 対応する文字列 |
| RGB 8 | RGB8Packed |
| BGR 8 | BGR8Packed |

3)work_thread()にpDataをnumpy配列に変換するコードに書き換えます。
(画像の確認が出来るようにcv2.imshow()とcv2.waitKey()の2行を入れています。)
|



