<エッジPCの選択>
色々なPCがありますが、下記の2つが多いようです。
1.ラズベリーパイ
2.NUC
1.ラズベリーパイ
(メリット)
・非常に低価格であり、大きさも小型(カードサイズ)です。
(デメリット)
・最新のRaspberry Pi 4からUSB3ポートが付き、メモリーも1GBを超えましたが、安定性や性能では通常のPCより劣ります。
・OSがLinux(リナックス)なので汎用ソフトがありません。プログラムを組むことが前提です。
・ノードライバーのカメラ(UVCカメラ)しか対応ができません。
(一部の産業用カメラも使える場合がありますが、Linux対応のSDKが提供されていることが前提です。)
・ノードライバーのカメラはトリガー用外部入力端子等が無いものがほとんどです。
PC側でトリガーをとりこめるように製作プログラムで工夫する必要があります。
ラズベリーパイを使っての構築は価格が安くて、一見、手軽に簡単に構築できそうなイメージですが上記のような理由で構築を失敗される方が多いです。
2.NUC

(メリット)
・通常のWindowsPCで動くカメラは全て動きます(産業用カメラ、UVCカメラ、Webカメラ)。
・OSがWindowsベースなので、市販されているトリガーソフトや取り込みソフトが流用できます。
(プログラムを組まなくても、市販のものでシステムが組めます。)
・産業用カメラはトリガー用外部入力端子等がついているものが多く、センサやPLCから直接トリガー信号を入力することができます。
(デメリット)
・サイズは手のひらサイズになります。(ラズパイよりは大きくなります。)
・価格が高価になります。(通常のPCと同等程度です。)
(通常のWindowsPCの超小型版というイメージです。)
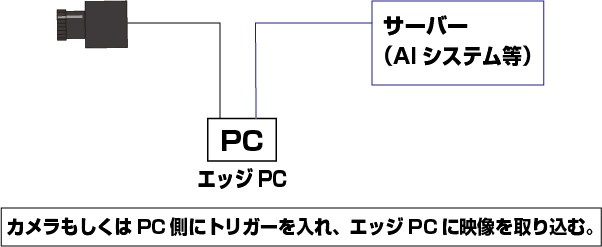
<システム例>
1.ラズベリーパイを使って取り込む場合
カメラの選び方→ UVCカメラを選ぶことが基本です。
UVCカメラのHPはコチラ → こちらから
トリガー方式 → カメラにトリガー用外部入力端子がないので、ソフト側でトリガーを掛ける工夫が必要です。
プログラム → 外部トリガーが入った時に指定のファイル名で保存する
レベルであってもお客様自身でプログラムを組む
必要があります。
ラズベリーパイを使用します。
ショートカットキーを埋め込んだプログラムをご自身で組みます。
その上で下記のUVCカメラ(USB2.0のみ)を使います。
プログラム構築に時間がかかり、玄人向きな構築方法です。
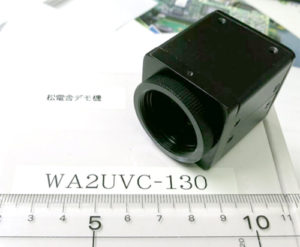
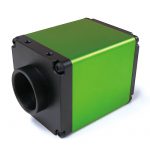
左写真が弊社が販売しているUVCカメラです。
・レンズマウント : Cマウント
・インターフェイズ : USB2.0
・画素数 : 130万画素
*市販のアプリケーションは使えません。
UVCカメラのHPはコチラ
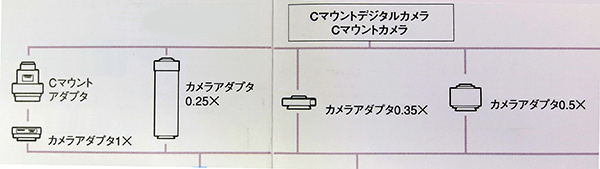
2.NUCを使って取り込む場合
カメラの選び方 → 汎用の産業用カメラ
(レンズ交換もでき、種類も多く、USB3.0も対応、トリガー用外部入力端子もあります。)
松電舎のUSBカメラはこちらから
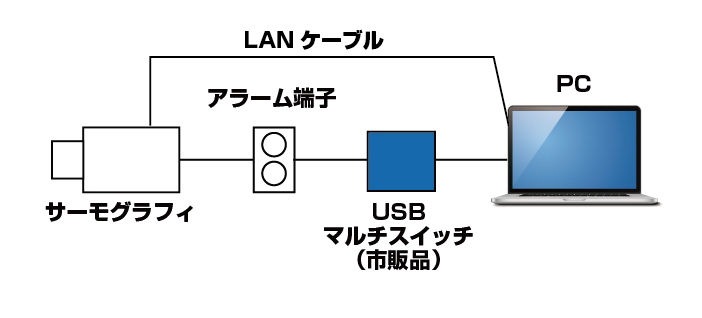
トリガー方式 → カメラのトリガー用外部入力端子に直接入力するのが簡単です。
プログラム → 外部トリガーが入った時に指定のファイルで保存するレベルで
あれば、1万円程度でアプリケーションソフトが売っております
ので、これを流用すればプログラムは不要です。
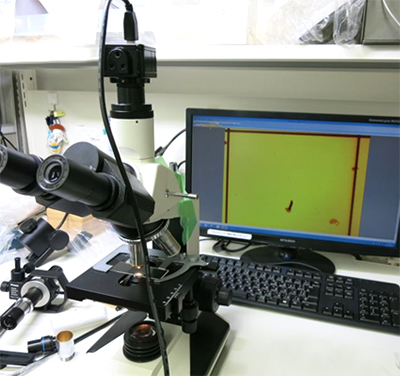
弊社でもWindows対応の下記のような取り込みソフトを販売しております。


NUCを使用します。 カメラは豊富にあるので、イメージに近いカメラを選びます。
産業用カメラのHPはコチラ → こちらから
プログラムは組まないで、上記のTriggerF Lightを流用します。
導入費用はラズベリーパイで構築するよりは高くなりますが、
プログラムを組むコストと外部入力機器のコストが不要となります。
これなら30分~1時間程度で簡単に構築できますね。
弊社ならNUCパソコン、トリガーソフト、産業用カメラをまとめての
デモ機貸出も可能です。
もしこういったカメラからエッジパソコンへの映像・画像取り込み方法、映像・画像取得方法で ご不明な点、ご相談がございましたら弊社には専門家が常駐しております。
ぜひお問合せ下さい。

画像処理ソフト開発会社でチーフエンジニアとして
多くのソフト開発に従事してまいりました。
USBカメラ、ハイスピードカメラ、電子顕微鏡の
画像解析にも携わり、画像処理・計測・映像の
デジタル化と記録のソフト開発に関して
数多くの実績を持っております。
退職後、フリーランスのプログラマーとして
多くの大手企業のプログラム開発に
携わっておりました。
Windowsマルチスレッドを
C++を駆使して開発しています。
ソフト開発歴30年以上!
カリスマチーフエンジニアにお気軽にご相談、お問い合わせください。